2024-07-11 商业资讯 21
方壳电池模组组装线
一、介绍
 HyLaser方壳电池模组组装线是为方壳电池模组组装而设计的,是非常成熟的交钥匙组装线方案。随着汽车动力电池的兴起,汽车续航里程与电池容量之间的矛盾日渐突显,动力电池厂商多采用电池能量密度较高整体附件重量较轻的铝壳方形电池为主,能够迅速提高组装效率的方壳电池模组组装线受到了很多动力电池厂商的青睐,HyLaser的这类订单迅速增长。
HyLaser方壳电池模组组装线是为方壳电池模组组装而设计的,是非常成熟的交钥匙组装线方案。随着汽车动力电池的兴起,汽车续航里程与电池容量之间的矛盾日渐突显,动力电池厂商多采用电池能量密度较高整体附件重量较轻的铝壳方形电池为主,能够迅速提高组装效率的方壳电池模组组装线受到了很多动力电池厂商的青睐,HyLaser的这类订单迅速增长。
HyLaser方壳电池模组装配线生产效率≥12PPM,也就是说每分钟加工的电池单体数量至少为12个。最终优率可以达到99.8%,故障率≤2%,蓝本电芯为280Ah电芯,适应型号为T40-90,W150-220,H100-220。
HyLaser的方壳电池模组组装线被科学的分解成15个过程,包括检测过程,绑扎过程,焊接过程等,最终组装成1p8s,1p13s以及1p16s的电池模组,并且保证了模组结构紧凑,焊接质量好,绝缘性能可靠的电池模组。我们用几个段落来介绍这条电池模组组装线。www.huiyaointel.com晖耀智能400-963-3639
应用
以下是一些主要应用领域:
1. 电动汽车
方壳电池模组是电动汽车的核心组件之一,提供高能量密度和长续航里程。它们被用于电动乘用车、商用车和公共交通工具(如电动公交车)。
2. 储能系统
方壳电池模组在家庭储能系统、商业储能系统和大型电网储能系统中起着关键作用。它们能够存储多余的电能,并在需求高峰期释放,帮助平衡电网负荷。
3. 可再生能源整合
方壳电池模组被广泛用于风能和太阳能发电系统中,以平衡间歇性发电并提供稳定的电力输出。这些电池模组可以储存白天太阳能电池板产生的电能,并在夜间或无风时供电。
4. 备用电源
在数据中心、医院、通信基站等需要不间断电力供应的关键设施中,方壳电池模组被用作可靠的备用电源,以防止因电力中断导致的损失和停机。
5. 工业和商业应用
许多工厂和商业园区利用方壳电池模组来优化能源管理,提高能源使用效率,并减少用电成本。它们也可以用于电动叉车、物流设备等工业应用中。
6. 船舶和航空
方壳电池模组在船舶和航空领域也有应用。例如,它们可以用于电动船舶和混合动力飞机中,提供清洁和高效的能源解决方案。
7. 5G基站
随着5G网络的快速部署,基站对电力的需求显著增加。方壳电池模组可以为5G基站提供稳定的电力供应,确保通信网络的稳定运行。
三、优势
效率和优率:时间对于电池模组生产来说至关重要。晖耀激光的自动化生产线专为实现效率理想化、周期时间减少化和吞吐量优化而设计。自动化流程、同步工作流程和实时数据集成可实现无与伦比的生产力。
精度和质量:精度是电池模组制造的基石。我们的生产线利用新型激光技术和机器人技术来确保电池组件的精密组装、定位和焊接。其结果是电池模组的质量和性能毫不妥协。
灵活性和适应性:电池应用的多样化需要多功能性。晖耀激光的自动化生产线可灵活适应各种电池模组设计、尺寸和规格。无论是电动汽车、能源存储还是航空航天应用,我们的生产线都能满足您的特殊要求。
无缝集成和智能自动化:机械和自动化系统的无缝集成确保了生产线的凝聚力和智能性。我们的智能自动化解决方案增强了过程控制、减少停机时间并优化资源利用率,同时需要减少的人工干预。
安全和可持续发展:我们优先考虑操作员和环境的安全。该生产线配备安全功能,符合国际安全标准。此外,我们对可持续发展的承诺体现在生产线的节能设计和环保实践中。
四、工艺流程分解
方壳电池模组组装线堆叠段
扫描电芯码\OCV分选工序
电芯扫码流程,这是将每个电芯的二维码内容扫描,并储存于数据库之中。
OCV分选工位,对于开路电压,电池电容以及电阻差相近的电池,进行分选分组,以保证电池模组的一致性。OK电芯进入下个工序,对于不符合条件的NG电池,挑选出来,放入缓存区,另行处理。HyLaser的软件管理系统,以及组装线的系统能够很轻易的实现这个流程的目标。
这个工序的目的是将电池按照正负极的方型重新摆放有序。探针会将电池的正负极进行检测,根据检测加过,摆放位置不符合流程要求的,用机械手进行翻转放置。
电芯自动涂胶工序
这是一个硬件全自动操作工作站,这个工作站的作用就是给电芯的侧面涂胶,这样电芯与电芯之间可以更紧密而良好的固定,增强电芯堆叠的效果。HyLaser生产的涂胶机器,对于涂胶的数量,厚度把控非常准确,一台机器能够很准确而定量的涂胶,而且从不疲倦,任何一台机器都会比经验丰富的装配工做的更好,做的更多,在涂胶工艺提高了电池组装线的效率。
视觉检测工序
这道工序的目的是为了检测涂胶的效果,电池涂完胶之后,走到这个工作站,会有监控软件对此拍照,比对已经录入的涂胶的轨迹和标准,检测有没有中间间断的,或者漏涂胶的状况。
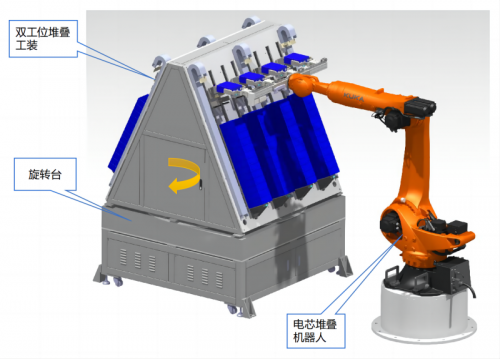
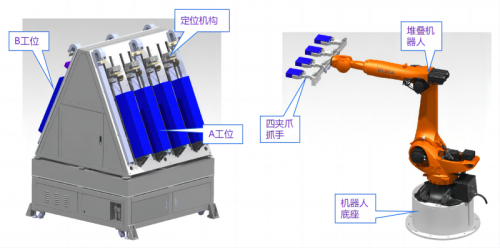
电芯堆叠工序
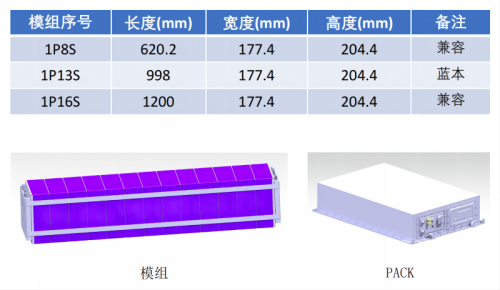
HyLaser设计的方壳电池堆叠工作台非常科学,如下图所展示,方型电池模组模具是一个角度很陡峭的斜坡的模式,两组模组同时工作堆叠,机器手每次抓取两个方型电芯,每个模组放一个电芯,电芯正极对外,自下而上堆叠。Hylaser现在非常成熟的有三种款式,包括1p8s,这个电池模组是8个电池堆叠,1p13s模组,是13个方型电池电芯组成的模组,还有1p16s,是16个方型电池电芯组成的电池模组。当然,HyLaser可以根据用户的需求,定制任何数量组合的电池堆叠模具和软件,以适用用户的需求。
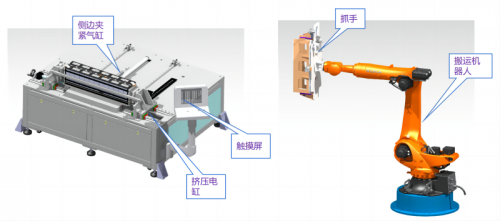
电芯自动挤压套钢带工序
自动挤压套钢带工序是一个人工与机器结合的工位,在这个工作站,需要人工在电池的左右两边放置端板。电池模组的前后用框架将电池固定住,左右方向用机械推动挡板将堆叠好的电芯两端挤压,一条预制的固定尺寸的密闭钢带从下方自动给模组上套,装配工则从上方手工放好另外一条钢带。当左右两边挤压挡板放开的时候,电池自身的弹力膨胀将钢带与电池紧密的固定在一起,起到稳定的绑扎固定作用。
方壳电池模组组装线焊接段
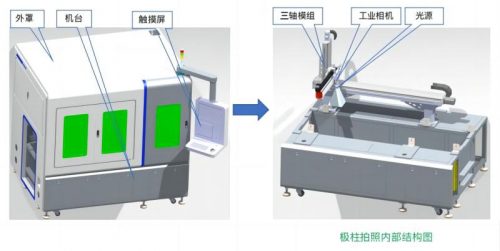
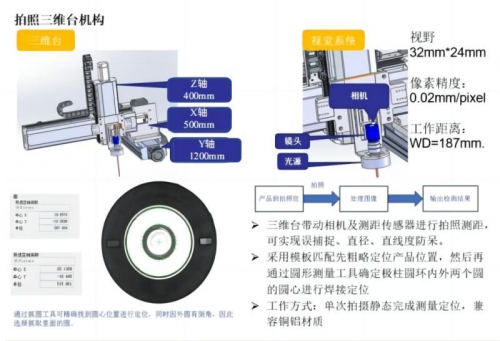
极柱拍照工序
极柱拍照工序也叫寻址定位工序,在这个工位上,对电池模组的每个电池阳极柱拍照,录入系统,系统对阳极柱做xy坐标定位,为后边的焊接动作确定准确数据录。
模组绝缘测试工序
这个工序是测试方壳电池模组的电池之间,以及两端的电池与端板之间是否绝缘。通过耐压绝缘测试来评估电气设备绝缘性能。这个工位上方分布着一排高电压探针,通过施加高电压在电芯的绝缘表面,来检测是否存在绝缘弱点或缺陷。
扫码绑定工序
这个工序是扫描每个电池模组上的二维码。这些二维码可能包含该模组的关键信息,如生产批次、规格参数、质量检验信息等,可以确保每个模组都可以被唯一标识和追踪。如果在后续生产或使用过程中出现问题,可以快速定位到具体的批次或工序,有助于快速排查和解决问题。
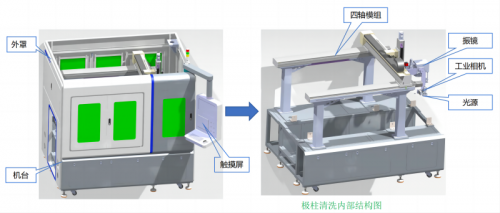
激光清洗工序
这道工序是利用激光对极柱表面的氧化物进行清洗,可以保证后期激光焊接的质量,保证焊点的清洁,保证焊点面积最大以及焊点的厚度最小,这会对电池的充电和放电有非常重要的意义。
安装ccs工序
这是一个人工工位,在这个工位上,需要人工放置电池母排之后,在母排的预留空隙放置巴片,然后工位转入下一个焊接工位。
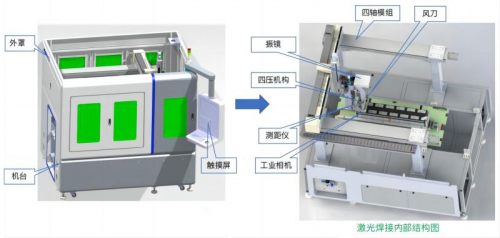
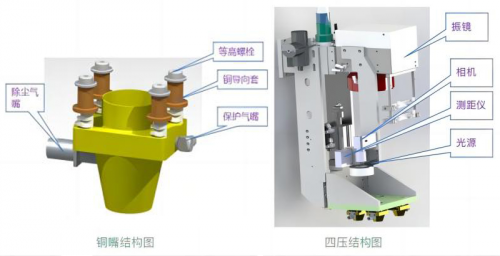
激光焊接工序
激光焊接工位是整个组装线里最重要的工位,技术含量最高,焊接机器最贵。HyLaser的激光焊接机,根据组装线的需要可以同时布置多个焊接点,这个焊接机器是6000瓦的功率,工作速度快,焊点深度控制准确,焊接面积大,焊层薄,效率高。
焊后检测除尘工序
这是一个人工工位,使用吸尘器对每个焊点进行抽风除尘,并且对焊点进行检测,看是否有漏焊、断焊、炸孔、虚焊等不良焊接的情况出现,保证100%的良好焊接率。
方壳电池模组组装线检测段
EOL检测工序
EOL测试是endofline测试的简称,也就是最终检测,这是一个很复杂的检测过程,对设备商的要求非常高。因为这个测试需要在很短的时间内,变换不同的测试方式,对将要下线的模组进行11个项目的测试,并保存测试数据。
EOL测试通常包括电压,功率,电阻等测量和分析,可以确定电池的寿命和剩余电量,验证电池包与BMS的配合,发现电池的潜在品质缺陷。HyLaser生产的测试集成系统,准确率高,测试速度短,很受市场的追捧。www.huiyaointel.com晖耀智能400-963-3639
五、案例
280Ah方形电芯半自动电池模组组装线培训方案
1、设计要求
1.1产品信息:(280Ah电芯)
除蓝本模组外,兼容需新增工装、托盘等,属增值服务
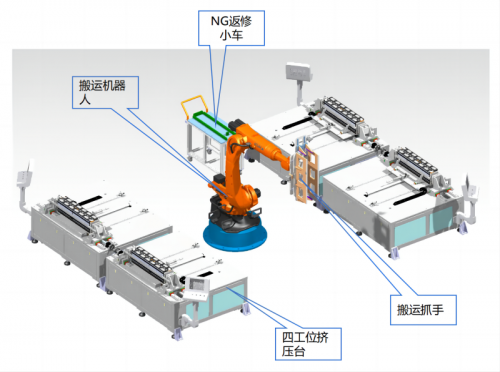
2、方案布局
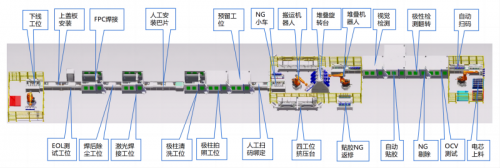
2.1布局图
设备占地尺寸(L*W*H):51000mm*7500mm*3500mm
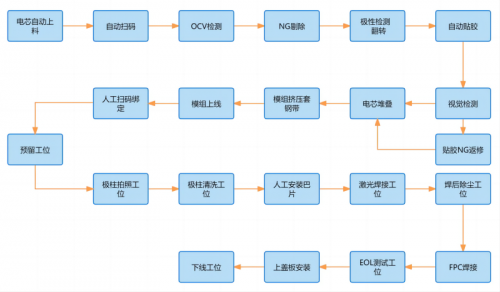
 2.2工艺流程
2.2工艺流程
3、功能模块介绍
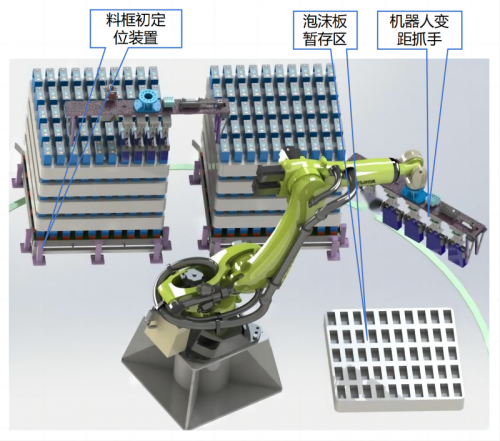
3.1电芯自动上料工位:
工位介绍:
人员将标准料框搬运上料位→机器人抓手旋转至电芯位通过视觉定位抓取电芯→在抓取旋转过程中完成旋转变距动作→将电芯放至倍速线托盘中→机器人旋转至待料位
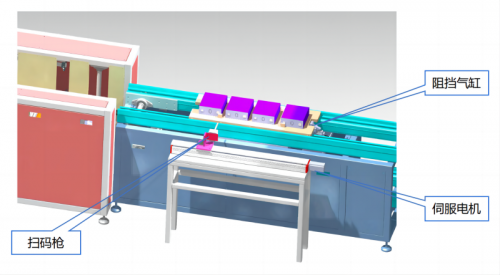
3.2电芯扫码工位:
工位介绍:
1、先通过阻挡气缸对托盘进行定位,然后扫码枪对电芯上的二维码进行扫
描读取,扫码枪安装在直线模组上,可自动对4支电芯依次扫码;
2、扫码完成后自动流至下一工位。
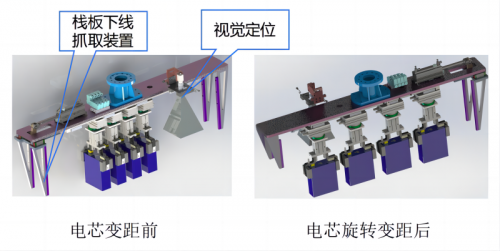
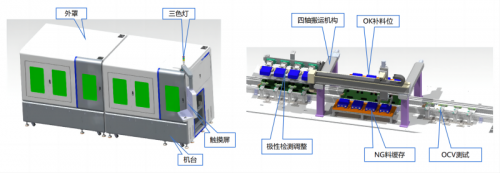
3.3OCV测试、NG剔除、极性检测工位:
工位介绍:
1、电芯由倍速链流到此工位后,先进行OCV测试,以保证电压及内阻符合
产品工艺要求;
2、OCV测试完后,进入下一个NG剔除工位,NG品将通过三轴搬运模组放
置到NG料缓存区;OK品存放在补料位,等待补料使用;
3、最后极性检测工位,根据设定的产品配方,对电芯夹取后进行翻转调整;
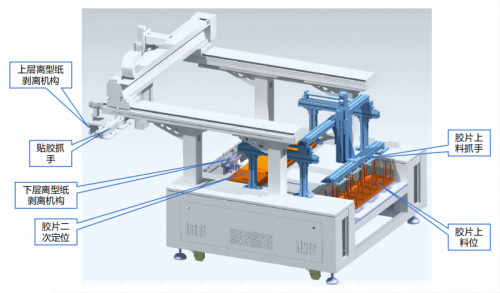
3.4电芯自动贴胶工位:
工位介绍:
1、电芯由倍速链流到此工位后,对电芯自动贴胶(片状胶);
2、把片状双面胶下表面的离型纸剥离,贴合到端板表面,再把片状双面胶上表面的离型纸剥离;
3、贴胶完成后自动流至下一工位。
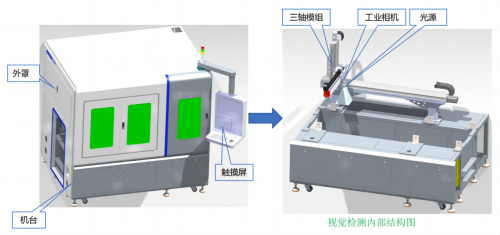
3.5视觉检测工位:
工位介绍:
1、电芯由倍速链流到此工位后,视觉自动对电芯贴胶位置进行测;
2、检测完成后自动流至下一工位。
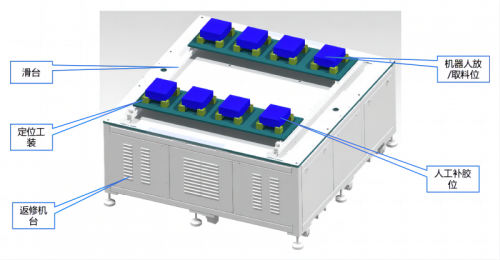
3.6贴胶NG返修工位:
工位介绍:
1、贴胶NG的电芯,由机械手抓取到电芯托盘上;
2、滑台自动滑出至人工位,人工进行贴胶返修;
3、返修完成后,按启动按钮,滑台自动滑入,至带料位,等待机器人抓取。
3.7堆叠旋转台工位:
工位介绍:
1、动作流程:堆叠机器人从电芯输送线抓料,按模组配方的串并顺序进行堆叠作业,以此堆叠方式,能柔性兼容不同配方串并顺序的模组组合。
2、抓手由机器人控制抓取机构,抓手设计有光电感应电芯在位。模组堆叠平台,采用固定斜坡式双工位设计,每个工位含有四套夹具,每次可同时放四个电芯。A工位在堆叠作业时,B工位同步进行挤压前搬动工作,双工位交替进行,以此提升堆叠和搬动的效率。
3.8挤压工位:
工位介绍:
1、将贴完胶的电芯由搬运机器人放置到滑台放料位,滑台自动滑动至人工挤压位;
2、人工按启动按钮,侧边气缸夹紧,使模组长度方向水平;再按下挤压启动按钮,电缸带动顶板对电芯进行挤压,到达设定长度停止,人工套钢带;
3、安装完成后,按打开按钮,侧边气缸打开、挤压电缸缩回,再按滑台按钮,安装完成的模组再次滑动到放料位,由机器人抓取后放至后段倍速线。
3.9安全围栏:
介绍:
1、安全围栏的设计、制造及控制符合国家安全生产方面的相关法规、以确保生产过程上的安全。凡是可能发生人或机器损伤的地方均设置防护栏、围栏、安全网等设施,并进行必要的联锁保护。安全门锁要和系统进行安全联锁,产线工作时安全门自锁,不可打开。
2、动作流程:进入安全门操作流程:申请进入→机器人等设备停在安全位置→安全门打开→进入安全门
恢复生产操作流程:出安全门外→确认设备区域无人员→关闭安全门→输入恢复密码→安全门自锁→设备正常运行


3.10极柱拍照工位:
工位介绍:
1、设备主要有三维台、CCD和光源、机架机罩、测距仪、⾃动扫码枪五⼤部分组成;
2、动作流程:模组通过倍速链顶升移载到极柱拍照⼯位后,三维台根据⾃动扫码枪拍到的条码识别模组型号,程序⾃动匹配三维台CCD拍照⾼度后进⾏极柱寻位,再拍端板上2个MARK点,寻位完成后⾏成坐标系,通过视觉系统发送到焊接⼯作站,⼯装托盘下降后流⾄下⼀⼯位。
3.11.极柱清洗工位:
工位介绍:
1、设备主要有三维台、CCD和光源、自动扫码枪、机架机罩、振镜五大部分组成;
2、动作流程:模组通过倍速链顶升移载到激光清洗工位后,机器人根据自动扫码枪拍到的条码识别模组型号,机器人程序自动调整高度后进行测距、MARK点拍照,拍照完成后根据极柱拍照工位发来的坐标自动清洗每个极柱,清洗完成后工装托盘下降后流至下一工位。
3.12激光焊接工位:
工位介绍:
1、设备主要有三维台、振镜、CCD和光源、机架机罩、⾃动扫码枪、测距仪六⼤部分组成;
2、动作流程:模组通过倍速链顶升移载到激光焊接⼯位后,三维台根据⾃动扫码枪拍到的条码识别模组型号,三维台程序⾃动调整⾼度后进⾏测距、MARK点拍照,拍照完成后根据极柱拍照⼯位发来的坐标⾃动进⾏⺟排焊接,焊接完成后⼯装托盘下降后流⾄下⼀⼯位。
3.13EOL测试工位:

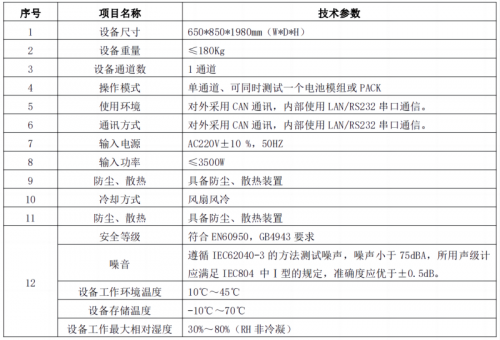
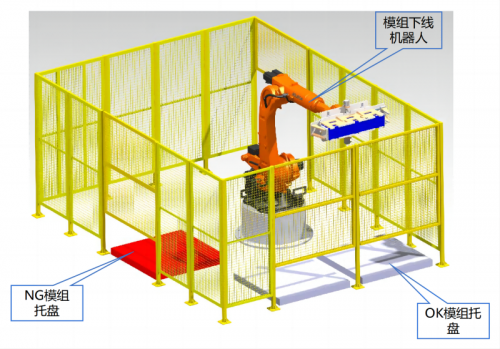
3.14模组下线工位:
工位介绍:
1、机器人自动将模组从倍速线搬运至物料托盘;
2、可将NG模组和OK模组分类放置。
4、主机参数
4.1 环形光斑激光器( 6000W )介绍:
焊接工位采用中久大光6000W环形光斑激光器,型号:DGMM-6000


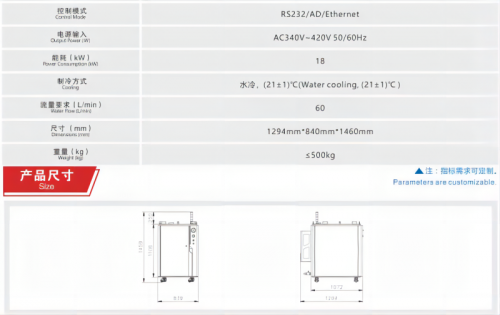
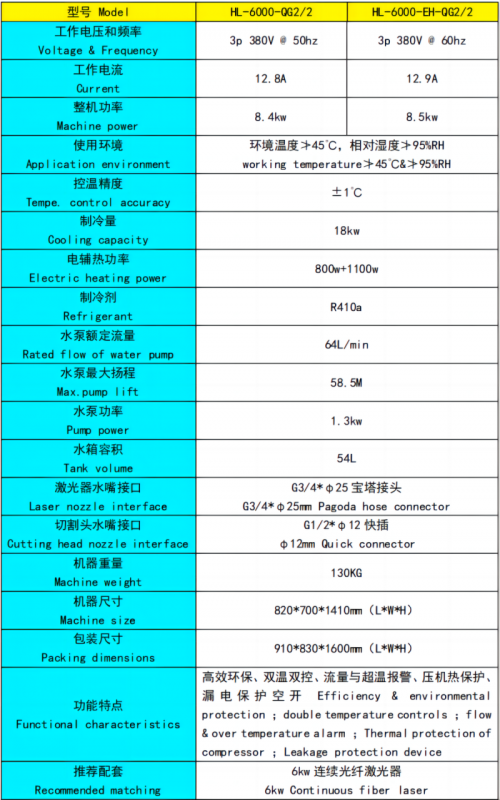
4.2冷水机介绍:
采用6000W冷水机,型号:HL-6000W

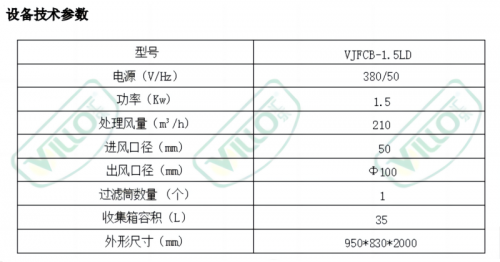
4.3除尘机介绍:
汇乐 VJFCB-1.5LD

www.huiyaointel.com晖耀智能400-963-3639